资源共享
下载技術文件:结合训练与推论的一体化工业视觉检测方案

资源共享说明
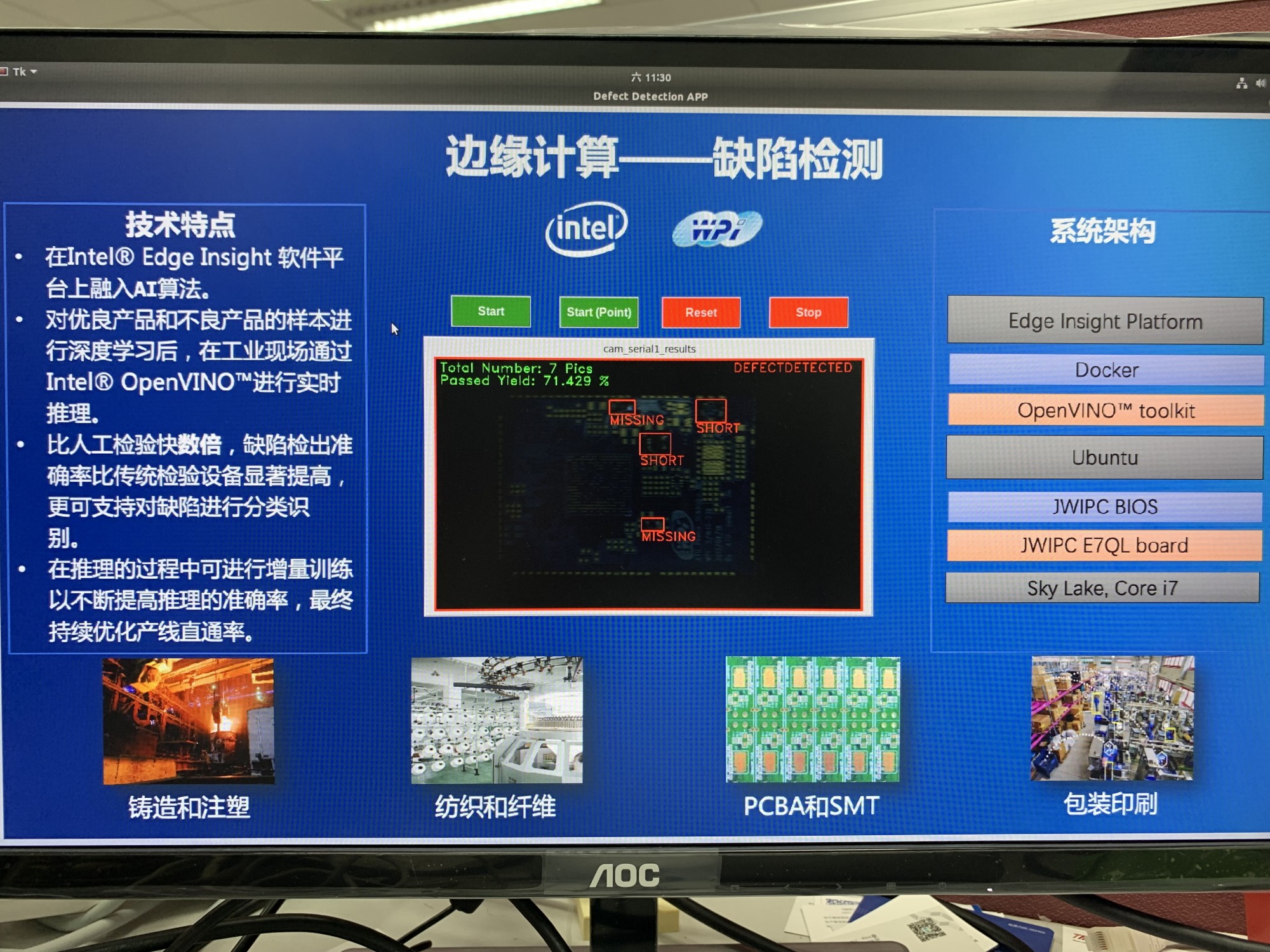
为了满足目前工业领域日益增加缺陷检测需求,英特尔与世平集团联合推出了“训练+推论协同一体化EIS (Edge Insight Software, 边缘计算平台) 工业视觉检测方案”。该系统运用Balser摄像机、网关和软件应用,支持高分辨率图像的采集配合传统视觉与深度学习视觉算法对已知类型的产品做缺陷的检验。国内某知名工厂方案铝件的产品缺陷检测即是基于此框架做实例的应用。
本方案是基于计算机视觉,通过对物品的图像数据的采集再经由专用边缘计算节点设备进行运算处理,将处理结果进行分发:
1: 控制机械手臂以及报警
2: 将数据上报边缘服务器
边缘服务器做数据的汇总处理分析再完成云端连接。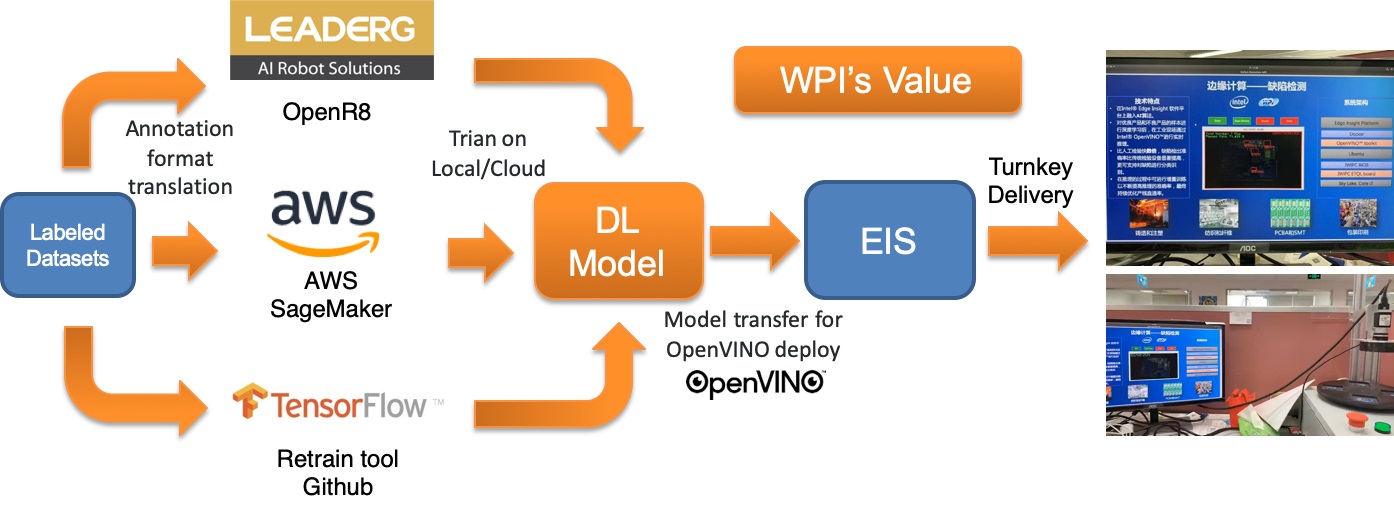
图1 EIS 模型路径参考
- 方案优势
1.1 识别结果过拟合度低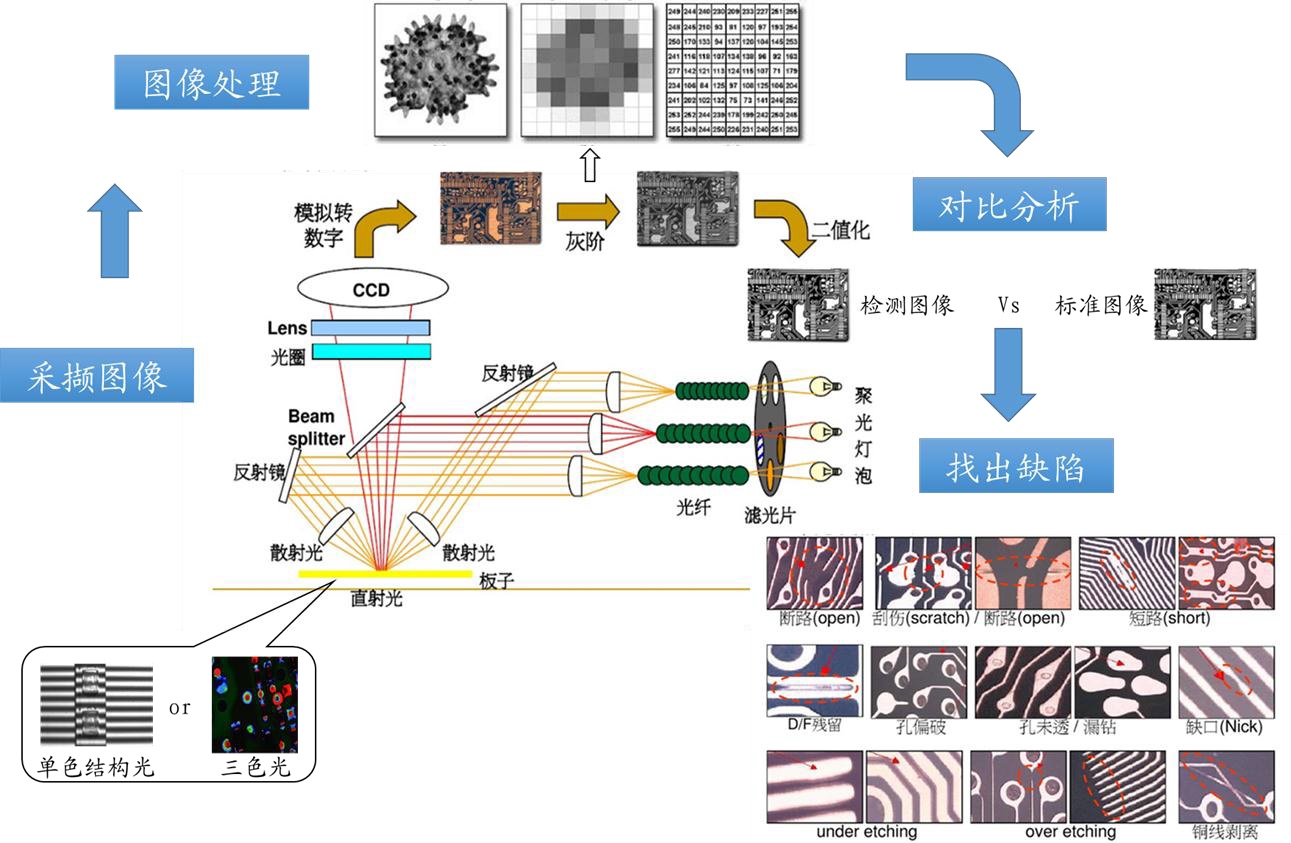
由于传统AOI方案采用光学视觉比对分析方法,对待测物件进行分析,检测过拟合率高,容易将良品误报为缺陷品,需要人工在后台做二次筛选,影响生产效率,提供人工成本。同时,鉴于AOI缺陷识别是利用先验的缺陷形状,做模式判别,本身可以分类的缺陷种类比较有限,无法判断对一种问题再做二次分类。
本项目基于AI黑盒模式进行缺陷分类,同时通过对大量样本数据的标注学习,自动完成缺陷目标检测,识别精度高,减少二次复查资源,同时,由于该方案利用深度学习技术,用户无需匹配特定缺陷特征,将全部交由人工智能自动完成全部的特征统计,因此可大大提高缺陷分类数,相比AOI,能够对更多的细分缺陷进行识别。
1.2 模块化部署
通常工业专案落地时,因为应用场景不同,系统架构往往需要根据项目需求做出重新设计,这大大提升了项目部署的复杂性与难度,耗费人力资源。本方案采用Docker模块化部署的技术,将数据采集、整合、存储、分析、算法部署、消息队列处理等步骤功能进行任务分割,并完善底层数据逻辑,从而实现了系统架构的可复制化,因此系统集成商无需从头到尾重新设计方案架构,只要完成功能模块的选配,参数设定以及模型再训练,便可基本实现整个方案的部署,极大降低了项目部署难度,从而提高系统复用性。
1.3 训练门槛低
本项目采用LeaderG的OpenR8图形化训练工具, 其内建多种主流深度学习框架(Tensorflow, Caffe, Pytorch…)与算法模型(SSD, MobileNet, GoogleNet..), 用户无需掌握编程技能,透过简单的瀏览器介面,仅用滑鼠就能使用,便可轻松创建深度学习模型。
资源共享应用
1. 方案优势
1.1 识别结果过拟合度低
Intel® 第二代神经计算棒 (Intel® NCS 2) 是Intel® 的最新的深度学习推理开发工具,搭载最新的 VPU (视觉处理器) –Intel®Movidius ™ X,其中包括片上神经网路加速器被称为神经计算引擎。 借助 16 颗高性能内核和专用的硬件神经网路加速器,使NCS 2 的性能相比上一代提升高达 8 倍。
1.2. 软件工具,以加快深度学习推理
Intel® 发布的 OpenVINO 工具包是主要的软件开发套件,用于在 Intel®Movidius ™视觉处理器(VPU) 赏花优化性能、 集成深度学习推理和运行深度神经网路(DNN)。 (上一代,开发人员使用 Intel® Movidius NCS SDK)。 此工具包支持广泛的神经网路,可支持20 多个预先经过测试的模型,涵盖了图像分类、 物体侦测和图像分割。
1.3. 可在一个平台上开发、但部署在多个平台
用户可以借助一种中间的推论引擎表示(IR) 格式,在不同硬件平台上(CPU、 GPU/ Intel® 处理器显卡、 VPU、FPGA Intel® 处理器等)完成开发和测试工作。IR 概念可让用户使用多个框架构建例如TensorFlow ™, Caffe, MXNe 和ONNX 等模型。
2. 应用案例
• 胚布瑕疵检测——纺织厂圆机生产车间实时产品质量检测
• 基于图像识别的订单跟踪——成衣厂自动订单识别
• 金属表面缺陷检测——铝压铸件工厂产品质量检测
资源共享规格
3. 系统配置:当瑕疵品被检测到后,报警指示灯亮起。操作员需对产品及系统详细检查,确认无故障后,按下复位按钮,报警指示灯熄灭
3.1 硬件方案
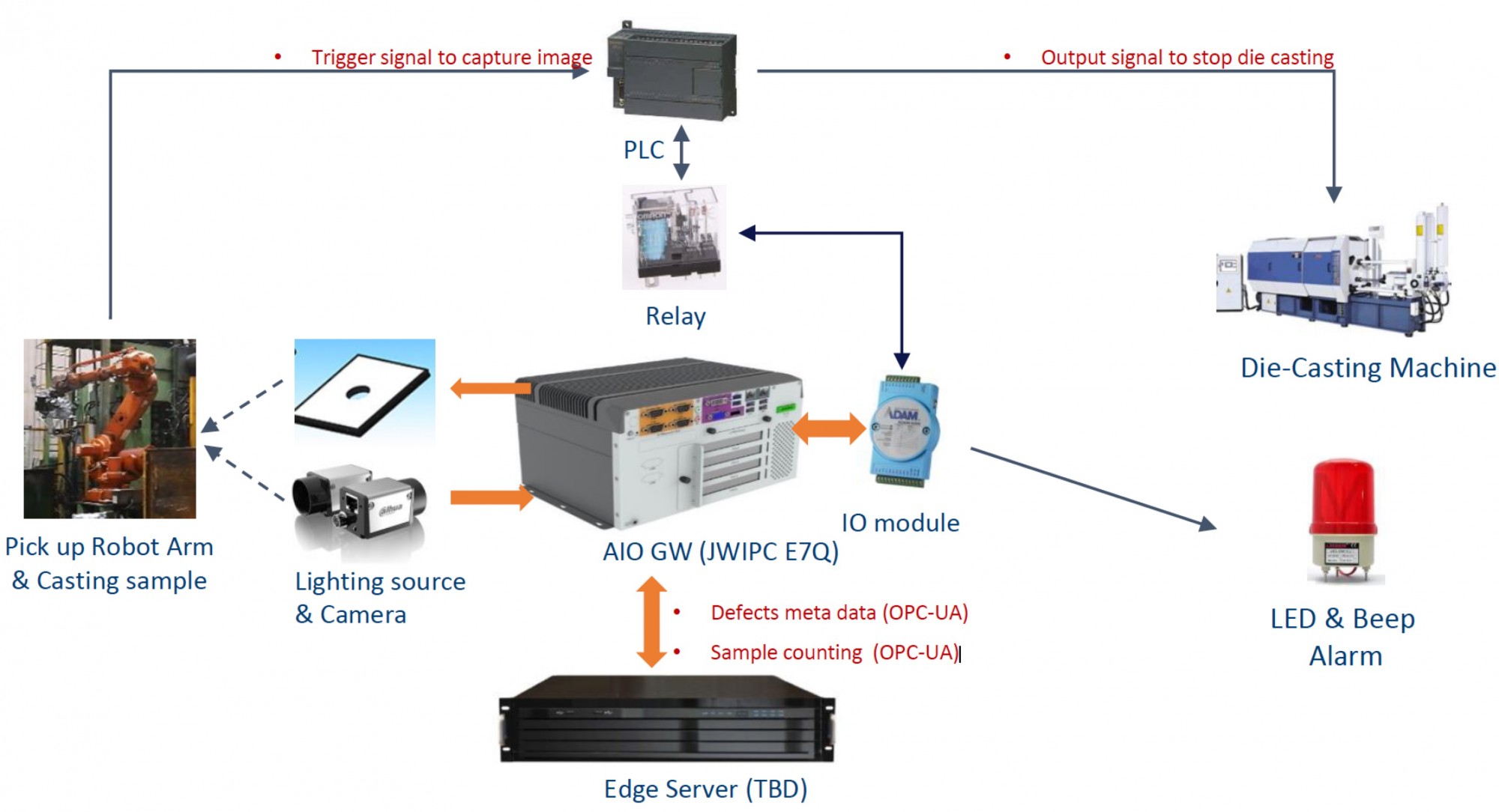
图4 方案硬件架构
本方案边缘计算节点采用JWIPC 公司(合作厂商)基于英特尔酷睿平台专门针对工业领域研发的 E7QL 机型,它的主要的一些特点为:
• 操作的环境温度比较宽,操作温度支持-20 到60 度。
• 无风扇设计避免灰尘。
• 搭载的chipset Q170 是工业专用芯片,稳定度好。
• 提供i3 到i7 不同CPU, 满足不同算力支持。最高端的酷睿i7 的算力能力强,4 核8 线程。
• 工业接口丰富,支持串口,千兆网卡,GPIO, USB3.0,MXM3.0 等一系列不同接口。
• 内置PCIE 扩展槽
• 模块化设计给用户不同的配置选择。
本方案基于TICK 时间序列处理架构,实现模块化的软件设计模式。
• Telegraf - 数据采集
• InfluxDB - 数据接收和存储
• Chronograf - 数据汇总展示
• Kapacitor - 数据处理,比如监控策略等
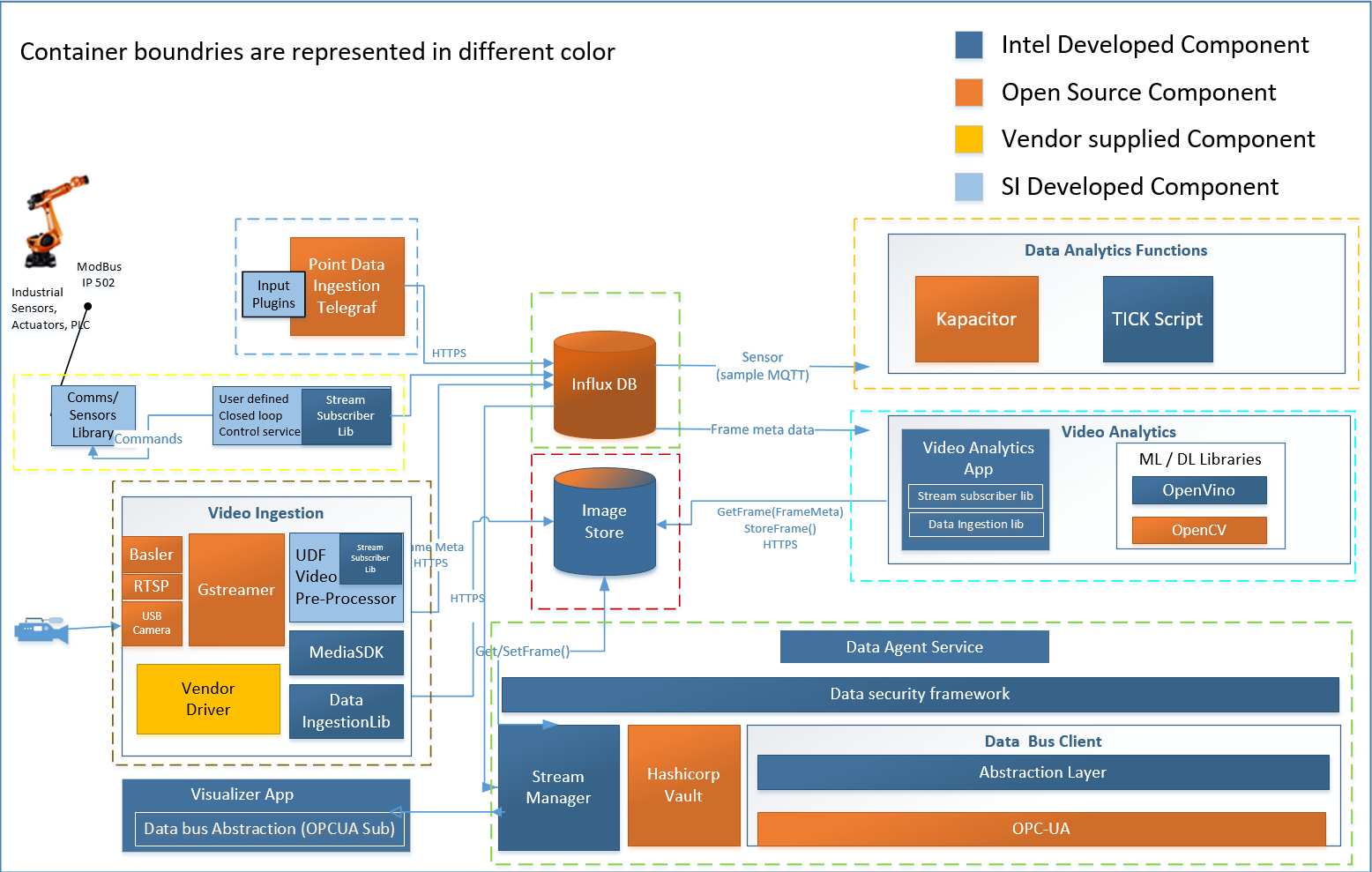
图5 方案软件架构
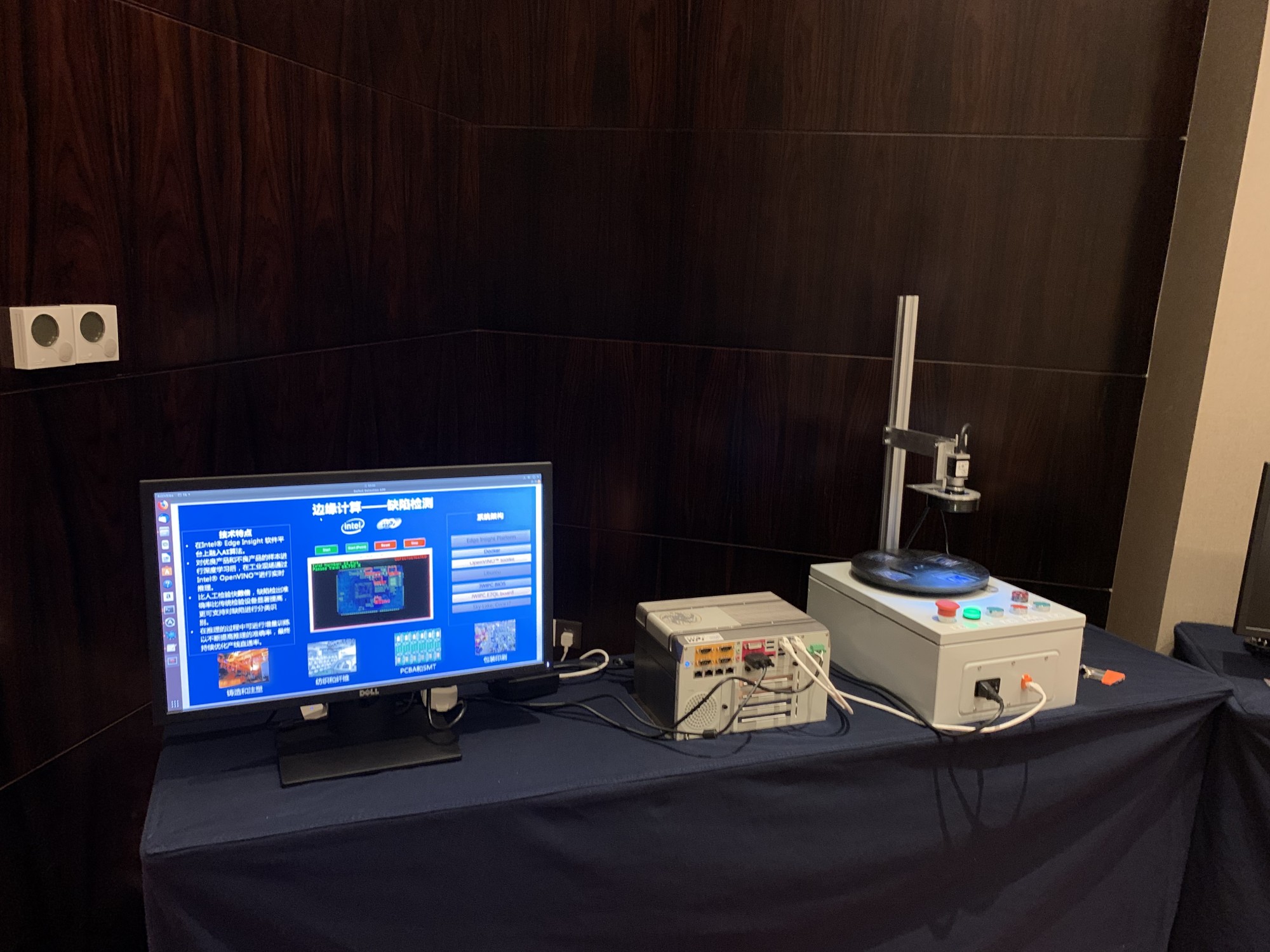
3.3 原型系统
4. 关键技术
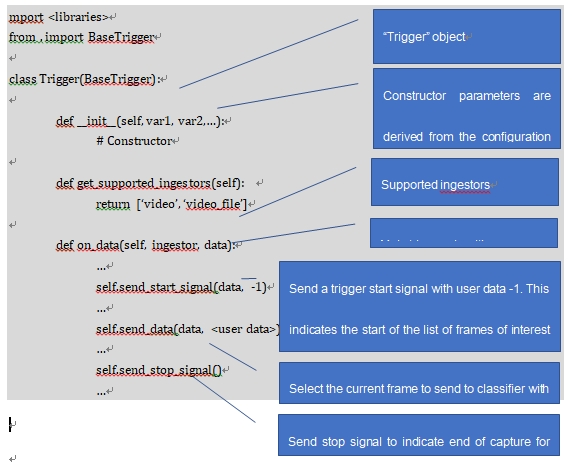
4.1 关键帧筛选
本方案采用OpenCV2 内建算法,通过像素点阈值的设定,采集多张待测物件正位图,并计算筛选出待测物在画面最中心的那一帧作为该
物件关键帧进行识别,同时提取其meta data 转存至InfluxDB 时序数据库中。
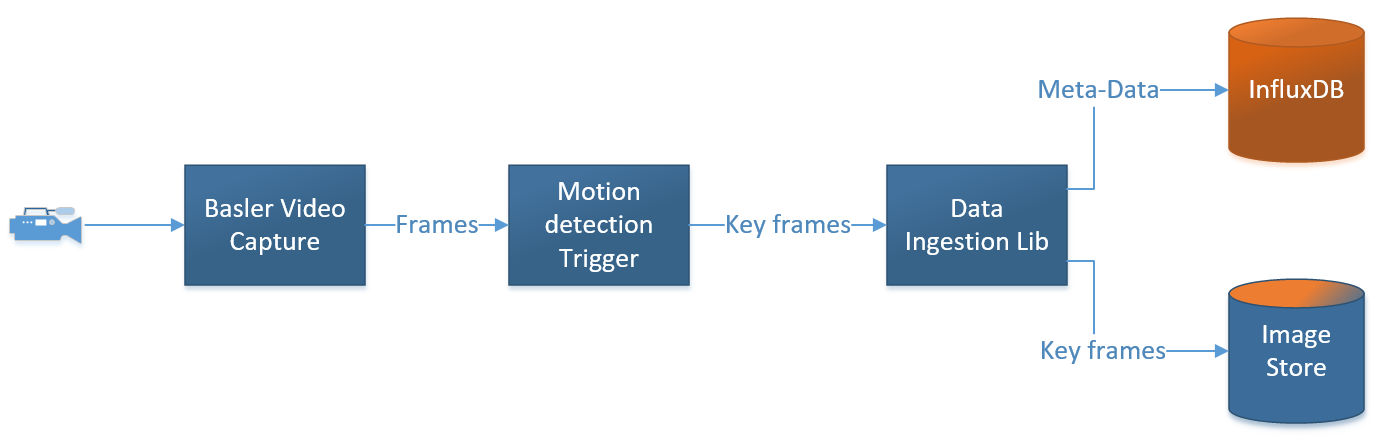
图7 数据采集流程